データだけ手っ取り早く見たい方はこちらからどうぞ。
GreenValley社のLibackpackという機材をお借りしたので近所でおためし。バックパックにLiDAR2つ(縦に回るものと横に回るもの)、GNSS受信機、360度カメラ、その他センサー(IMUとか)がパッケージされているものです。これを背負っててくてく歩くと歩いたルートの周りの点群データが得られるというものです。

この機材には基準点に設置するベースステーションも付属していて、座標既知点に置いてバックパックと同時に観測すればPPKでバックパックの位置を高精度に決めることもできます。
今回のお試しではGNSSはあまり使わず、バックパックのみの単独測位+SLAMで年末の三嶋大社を歩いてみました。単独測位のGNSSはあてになりませんので実質的にはSLAMだけで位置決定している感じです。
三嶋大社は南北約350m、東西約150m、面的にデータを取るとなると結構な移動距離になりSLAMだけで破綻せずに点群作れるのかなぁと心配しながら、バックパックを担いでお正月準備の進む三嶋大社の中を歩いてきました。
SLAM全般に言えることですが、この手の機械はできるだけ一筆書きで歩いた方が良いのでどのルートを行くかいろいろ悩みながら歩いて移動距離1617m(移動時間2037秒)で計測完了。機材マニュアル的にはSLAMだけでやるには移動距離がちょっと長すぎる感じではありました。もっと広い範囲を計測したい場合はエリアを分割した方がよいです。
↓の画像は機材のコントロールをするために持っていたタブレットの画面。ルートはリアルタイムに表示されます。いや、機能的には点群もプレビューされるのですが、はじめはリアルタイムに点群が出てきますが、だんだんタイムラグが生じてきて数分遅れとかになるのであまり実用的ではありません。衛星をいくつ捕捉しているかとか、位置決定がうまくいっているかとか、累積歩行距離がどれくらいになっているのかなどを確認するために使う程度がよさそうです。
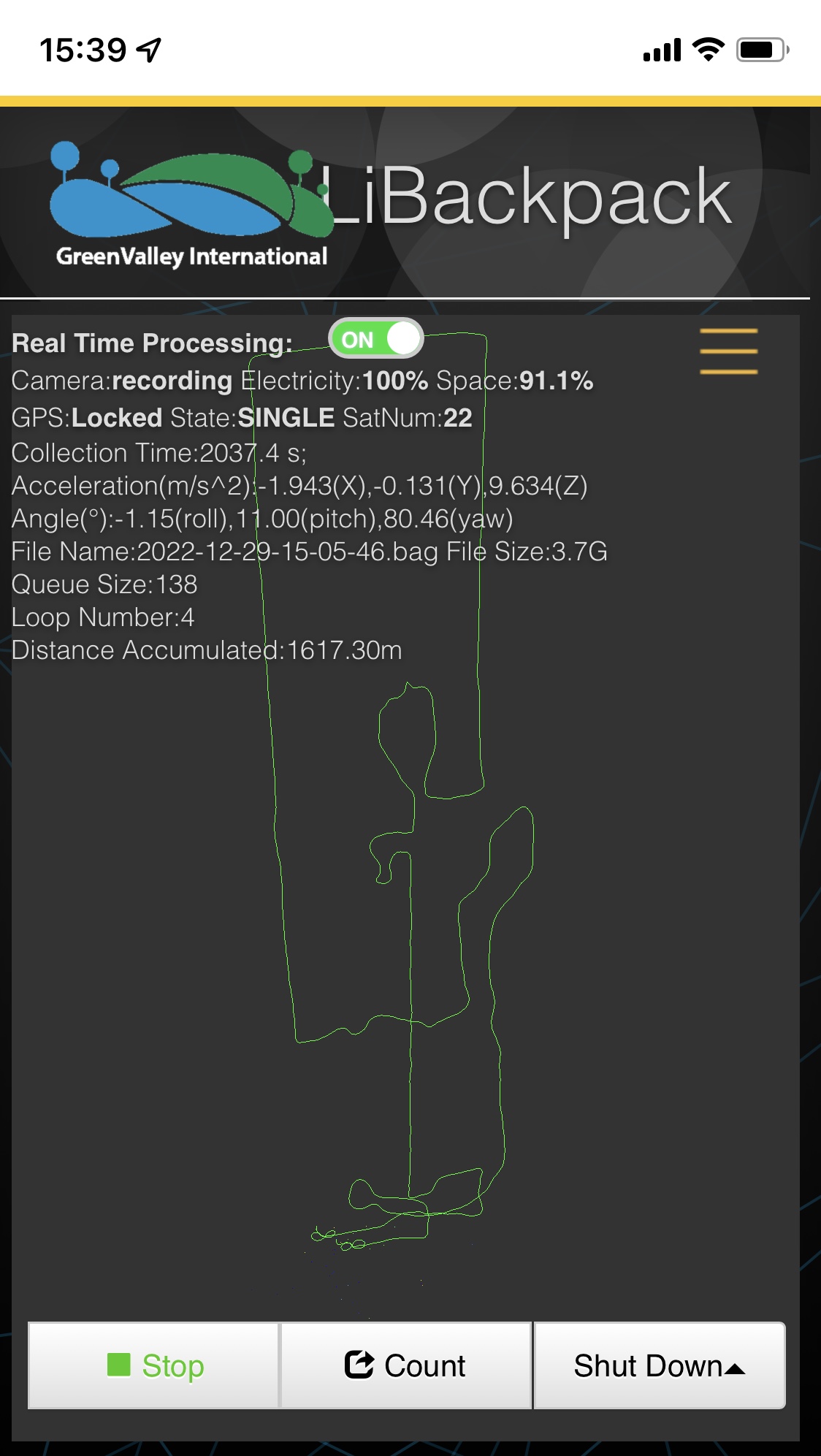
なお、計測開始時と終了時にはIMUのキャリブレーションのための8の字歩行をしないといけません。あと、計測前後にそれぞれ5分程度の静的アラインメント(ほっとくだけですが)も必要です。
というわけでできたのが以下の点群です。Potreeを使ってwebブラウザで閲覧できるようにしてあります。お正月準備が進んでいますので普段は建っていないテントなどもありますね。背負ったLiDARで測っていますので建物の屋根とかはうまくとれていません。なお、この機材には360度カメラが付いていて点群にカメラからの色付けができることになっています。ただ、ごく短い距離ならともかく、ある程度長い距離を移動するとカメラと点群の位置合わせができなくなってしまいます。いろいろ試行錯誤しましたがカメラの色情報を使った点群への色付けは諦めて、高度段彩をRGBに入れておきました。
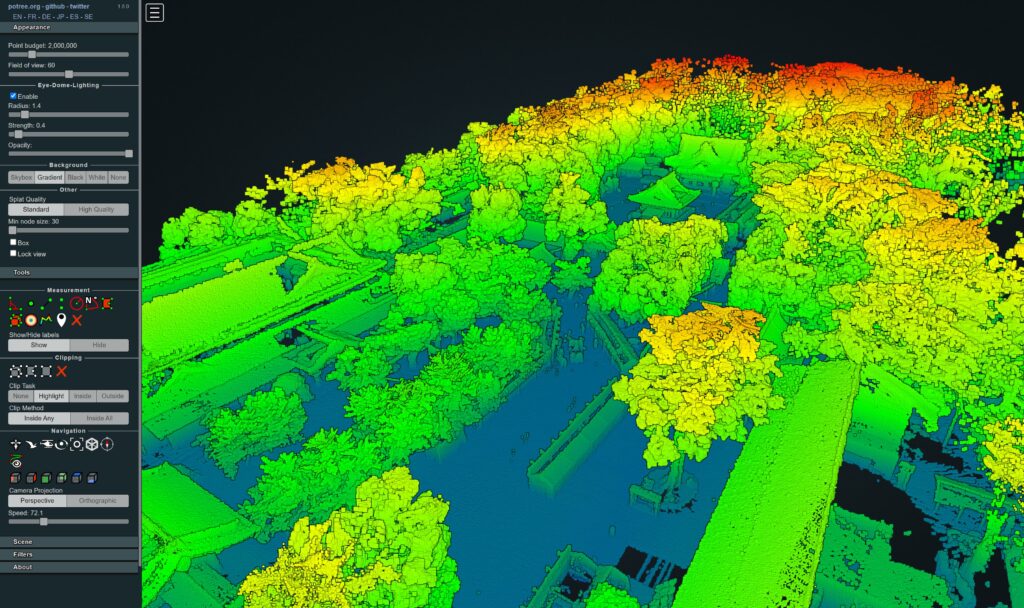
https://suzugeo.com/3D/mishimataisha20221229/
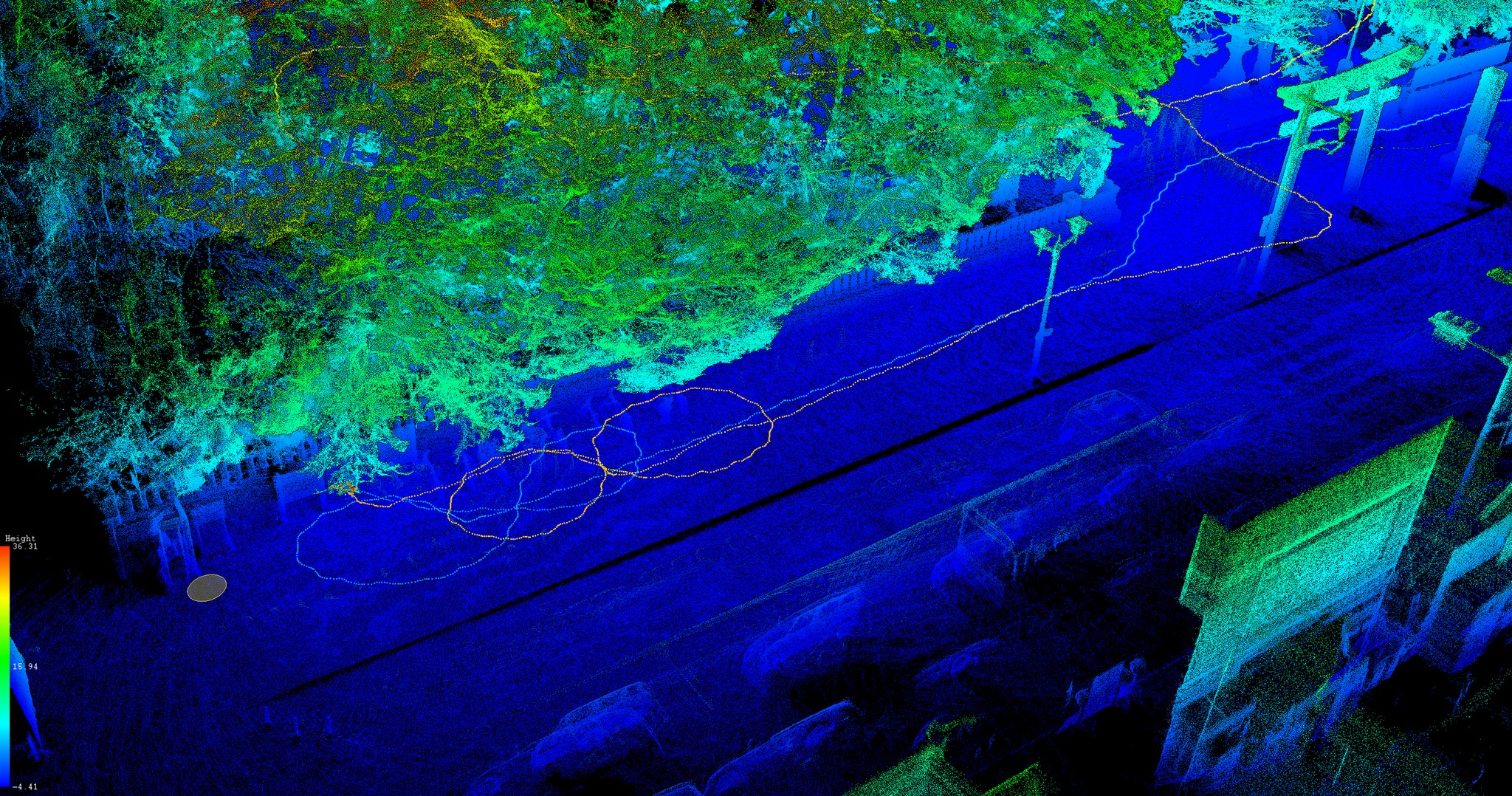
SLAMだけで結構広い範囲を測りましたので、もっと破綻(前半に計測した部分と後半に計測した部分があわなくなるなど)しちゃうかと思いましたが、ぱっと見もっともらしい感じになりました。よくよく見るとずれてしまっているところもあります。でもよく探さないとわからないと思います。例えば鳥居のだいたいの高さを測るというような用途に使う分には問題なさそうです。
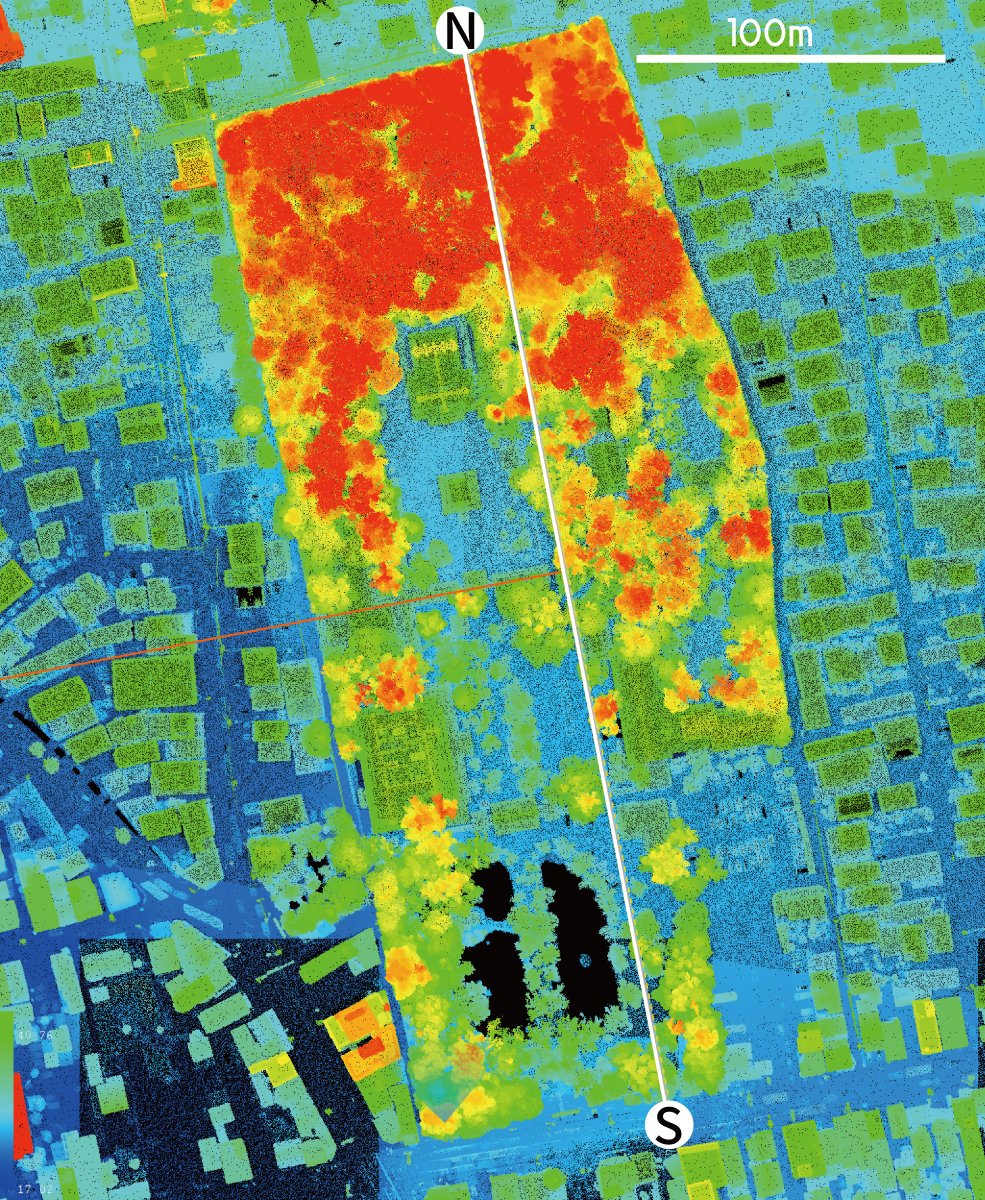
絶対的な精度や全体の形状はどうかというと、まあさすがにSLAMだけでは厳しいという結果でした。↓の画像は三嶋大社の南北断面です(断面の測線はここ)。赤い点は今回のバックパックで取得した点群。黄色い点は比較用の静岡点群です。断面の下にある数字は、静岡点群との標高差です。
{kind=link}
静岡点群と1m以上標高差があるところもありますし、実際の標高より高くなったり低くなったりしているので全体が歪んでしまっているようです。

でもまあSLAMだけでこれだけやれれば上出来ではないでしょうか。きちんとやりたい場合はちゃんとベースステーションを使って(あるいは電子基準点データ使って)PPKすればこういうことにはならないと思います。ただし、GNSSは森の中は厳しいので、社叢のようなところではうまくいかない可能性もあります。そういう場合は目立つ地物やバルーン型基準点の座標を測っておいてそれらを使って位置合わせをするしかないと思います。
ほんの数分でそれなりに面的かつ高密度な点群を取得できます。背負う形なので手持ちする機材に比べて安定かつ楽に移動できるのはなかなかいいなと思いました。側面からの計測が必要だったりドローンを飛ばしにくい場所では役にたちそうです。もちろん、ドローン+本機材、みたいな構成が一番ではありますが、そこまでする必要がある場合はあまり多くないかもです。
ただ、安い機材ではないので、使いどころは案外難しいかもしれませんが…。精度そのものは据え置き型のレーザースキャナーの方が良いですし。
この文章は2023年1月に書きました。